


이글의 전부 또는 일부, 사진, 소스프로그램 등은 저작자의 동의 없이는 상업적인 사용을 금지합니다. 또한, 비상업적인 목적이라하더라도 출처를 밝히지 않고 게시하는 것은 금지합니다.
2024년 9월 24일에 만물상(https://www.manmullsang.com)에 꽤나 오랜 시간 동안 팔리지 않고 있던 마이티블로우를 저렴한 가격에 구매했습니다. 보조배터리인 SP15000과 같이 구매했는데 공교롭게도 두 제품 다 VICT(http://vict.co.kr)라는 회사에서 만든 것이고 MPU로 UPD78F0515A를 사용한 제품입니다.
제품 사진입니다.


전면에 On/Off 스위치, CHARGING, AIR-C, BLOW 상태를 표시하는 led 3개, 차량과 연결하는 INPUT 6핀 커넥터가 있습니다.
문제는 INPUT 6핀 커넥터의 기능을 모른다는 점입니다. 그래서 분해하여 기능을 알아냈습니다.

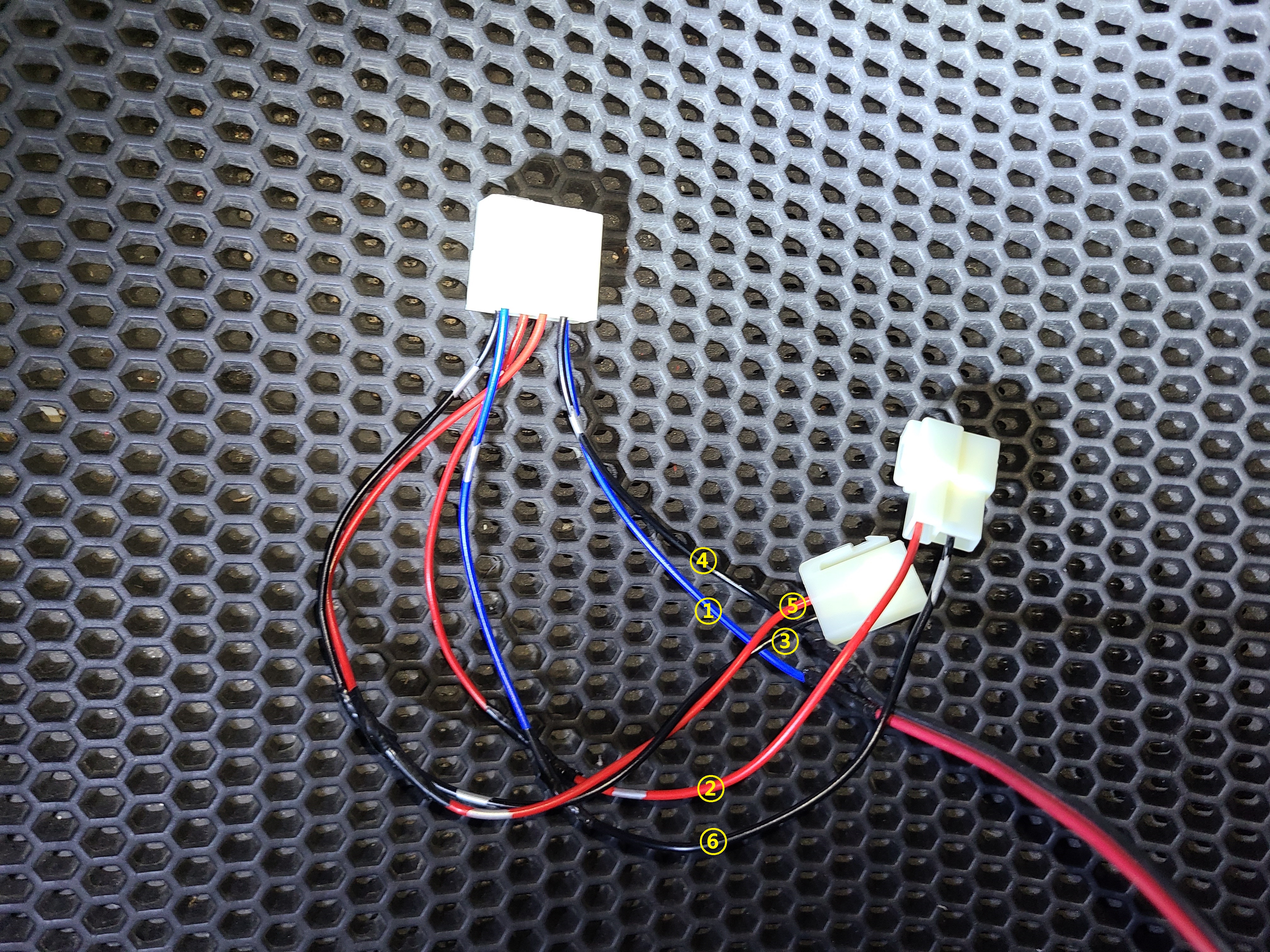
① ACC
② Blow+ in
③ Motor - out
④ GND
⑤ Motor+ out
⑥ Blow- in
차량과 연결하는 방법은 다음과 같습니다.
① ACC 단자에는 차량의 ACC 라인(12V)를 연결 (보통 붉은 선)
④ GND 차량의 프레임(0V)에 연결(보통 검은 선)
② Blow+ in : 차량에서 블로우 모터로 가는 선의 +를 연결
⑥ Blow- in : 차량에서 블로우 모터로 가는 선의 -를 연결(보통 검은 선)
⑤ Motor+ out : 블로우모터의 +에 연결. (위 ②가 원래 연결 되었던 곳)
③ Motor - out : 블로우모터의 -에 연결. (위 ⑥이 원래 연결 되었던 곳)
열어 본 김에 사진을 몇 장 찍어 봤습니다.
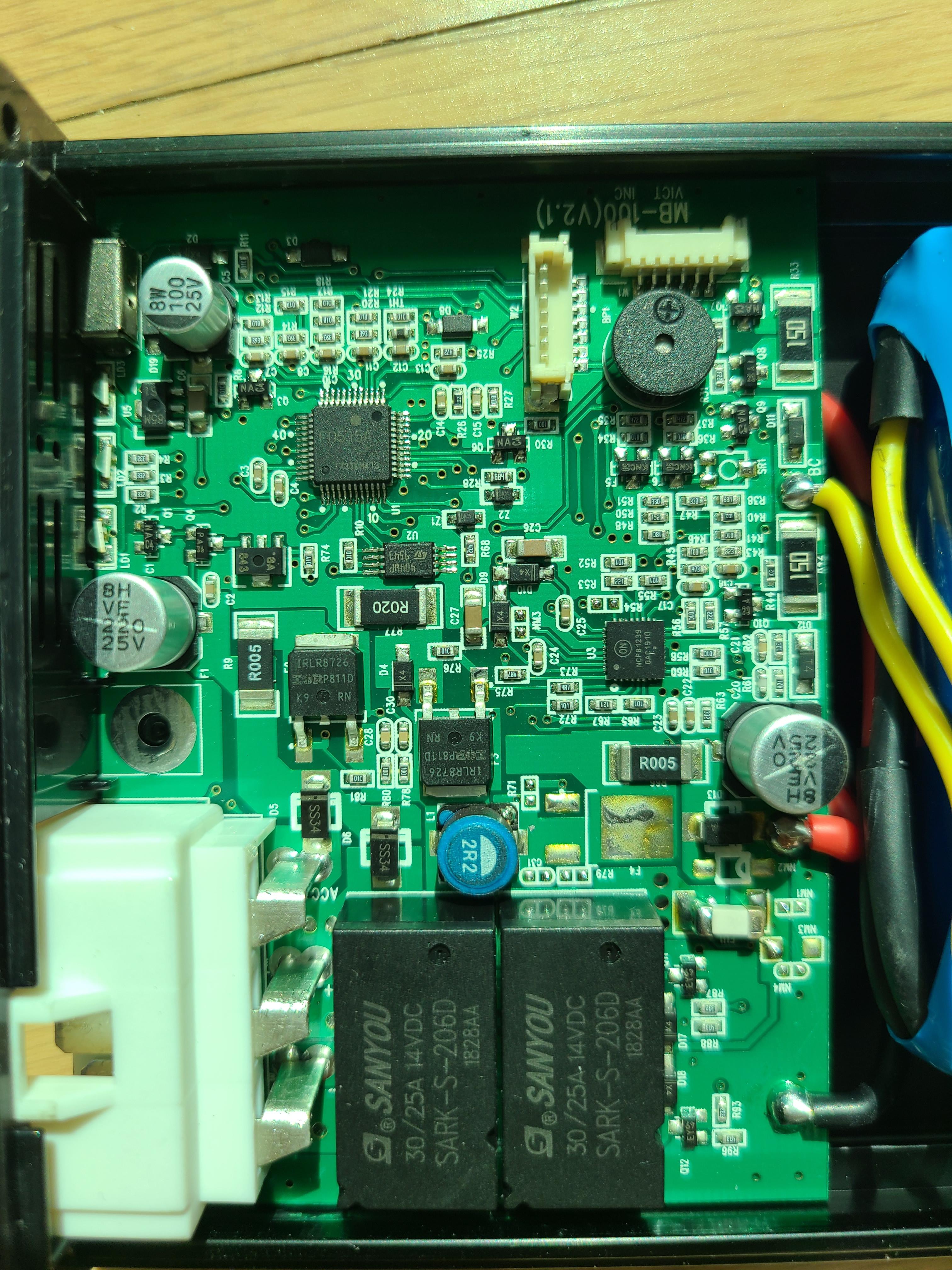
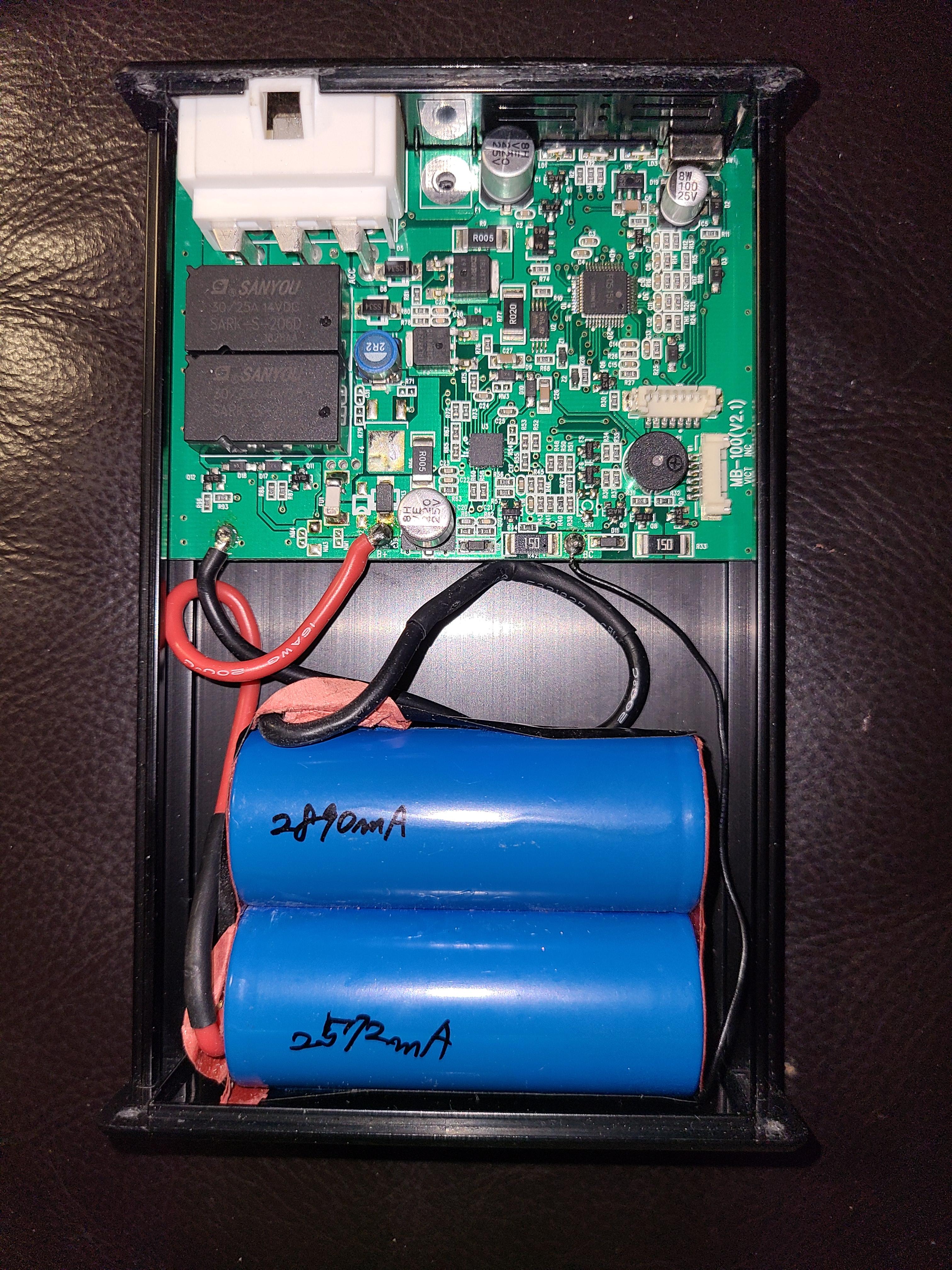
MBW1000 제어 기판 사진 위 쪽에 SP15000 제어 기판에서 봤던 UPD78F0515A가 있고, 그 오른쪽 위에 역시 SP15000에서 보았던 7pin 커넥터가 있습니다.
제어 기판에 릴레이 SARK-S-206D가 두 개 있습니다. 이 릴레이의 매뉴얼을 찾아보니 회로도가 다음과 같습니다. 모델명 중 206의 의미는 접점이 2개이고 정격 동작 전압이 6V라는 의미입니다.
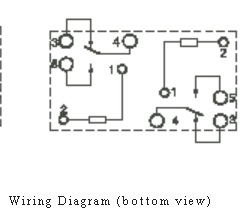
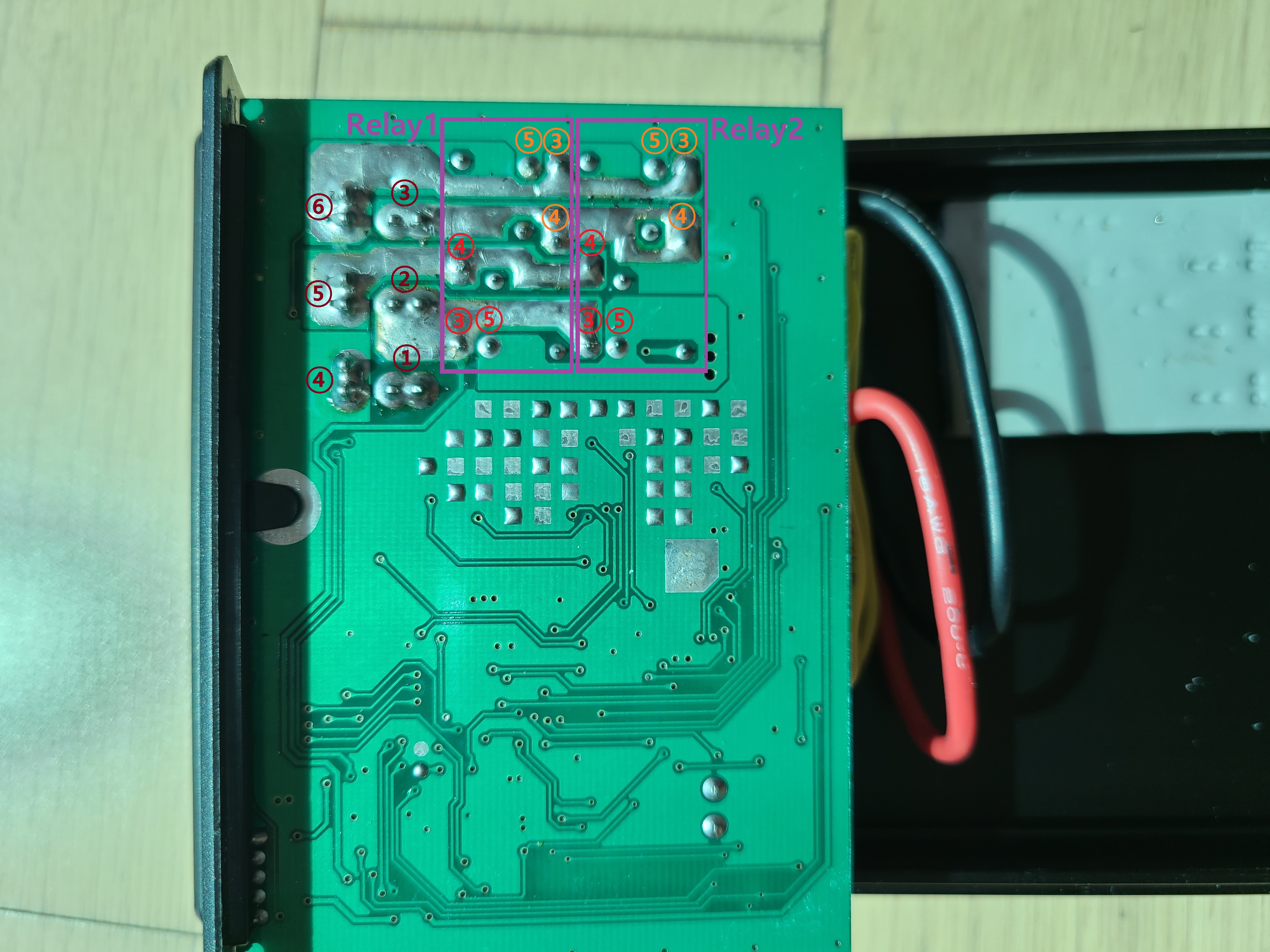
위 제어 기판 뒷면을 분석해 봅니다. 회로도를 보면 SARK-S-206D 릴레이는 ④, ③, ⑤를 한 단위로 하는 접점을 두 개씩 가지고 있습니다. 평상시에는 ④와 ③이 연결되어 있다가 전원이 들어 와 릴레이가 동작하면 ④와 ⑤가 연결됩니다.
INPUT의 ⑤번 핀 Motor+ out(갈색 ⑤)은 Relay1과 Relay2의 빨간색 ④에 연결되어 있습니다. INPUT의 ②번 핀 Blow+ in(갈색 ②)는 Relay1과 Relay2의 빨간색 ③에 연결되어 있습니다. Relay1과 Relay2의 빨간색 ⑤는 배터리의 +(즉 6.2V)에 연결되어 있습니다.
위 연결을 살펴 보면 평상시에는 릴레이의 빨간색 ④와 ③이 연결되어 있으므로, INPUT의 ⑤번 핀 Motor+ out(갈색 ⑤)은 INPUT의 ②번 핀 Blow+ in(갈색 ②)와 연결되어 있습니다. 그러다가 Relay1과 Relay2가 동작하면 릴레이의 빨간색 ④와 ⑤가 연결되므로, INPUT의 ⑤번 핀 Motor+ out(갈색 ⑤)은 배터리의 +와 연결됩니다.
같은 원리로 노란색 ④, ③, ⑤의 동작도 살펴 봅니다. 평상시에는 릴레이의 노란색 ④와 ③이 연결되어 있으므로, INPUT의 ③번 핀 Motor- out(갈색 ③)은 INPUT의 ⑥번 핀 Blow- in(갈색 ⑥)과 연결되어 있습니다. 그러다가 Relay1과 Relay2가 동작하면 릴레이의 빨간색 ④와 ⑤가 연결되므로, INPUT의 ③번 핀 Motor+ out(갈색 ③)은 갈색 ④번선(GND 및 배터리 -)와 연결됩니다.
위 분석을 종합하면 평상시에는 Motor+ out과 Motor- out이 각각 Blow+ in과 Blow- in에 연결되어 있습니다. 따라서 차량의 공조기를 조절하는대로 블로우 모터가 반응합니다. 그러다가 MBW1000이 작동하기 시작하면 릴레이를 동작 시켜서 배터리로 블로우 모터를 가동시킬 수 있습니다.
릴레이 SARK-S-206D는 접점 허용 전류가 30A입니다. 그런데도 릴레이를 두 개 사용한 것은 하나가 고장나더라도 정상 동작하게 하기 위함이 아닌가 생각합니다.
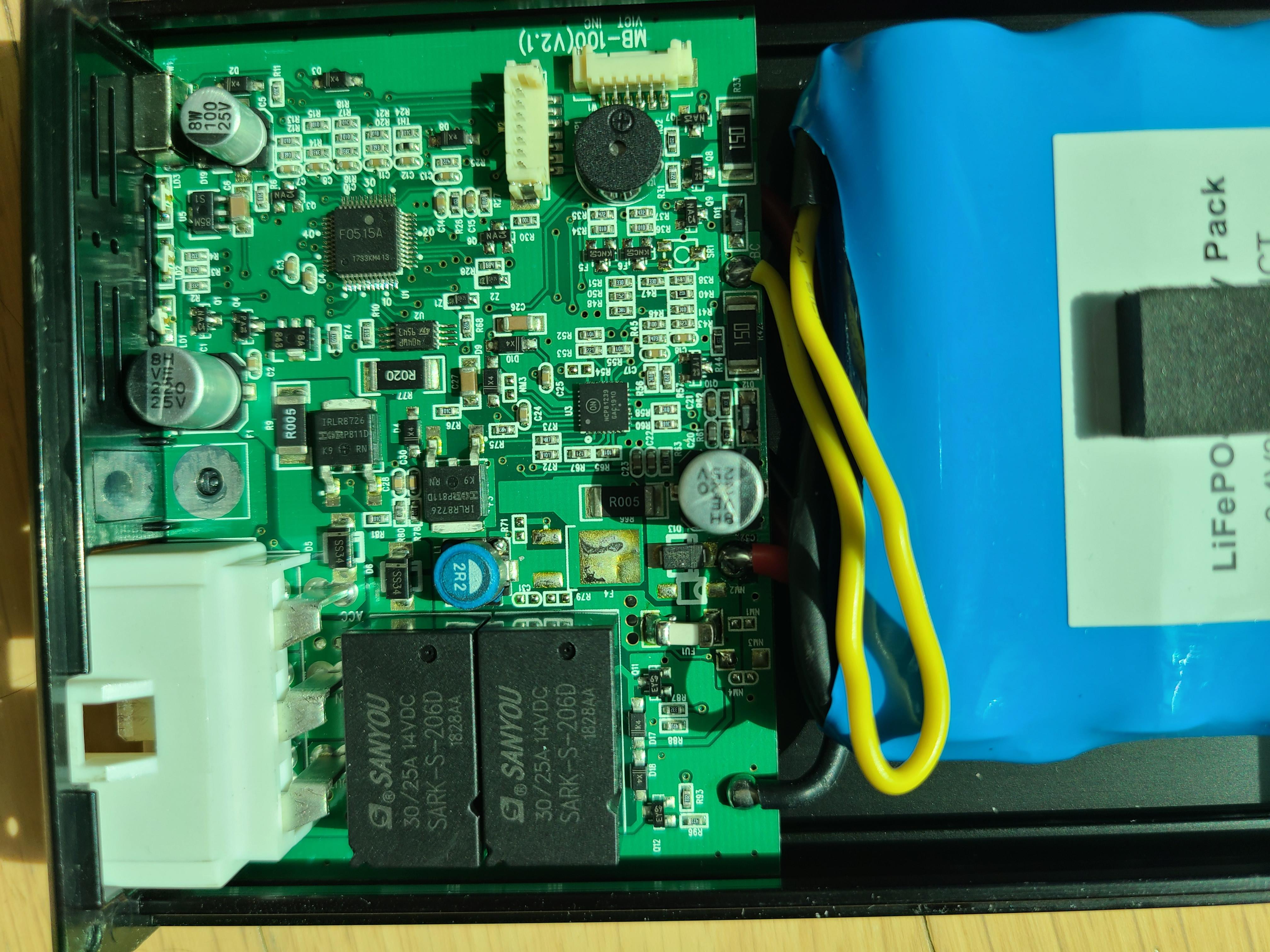
18650 인산철 배터리가 4개 들어 있습니다. MBW1000의 배터리 규격이 6.4V, 3200mAh입니다. 개당 1600mAh 배터리를 2S2P로 묶어 놓은 듯합니다. 알리익스프레스 검색해 보니 lifepo4 3.2V 3000mAh 배터리 4개에 약 $18 정도에 구매할 수 있습니다.
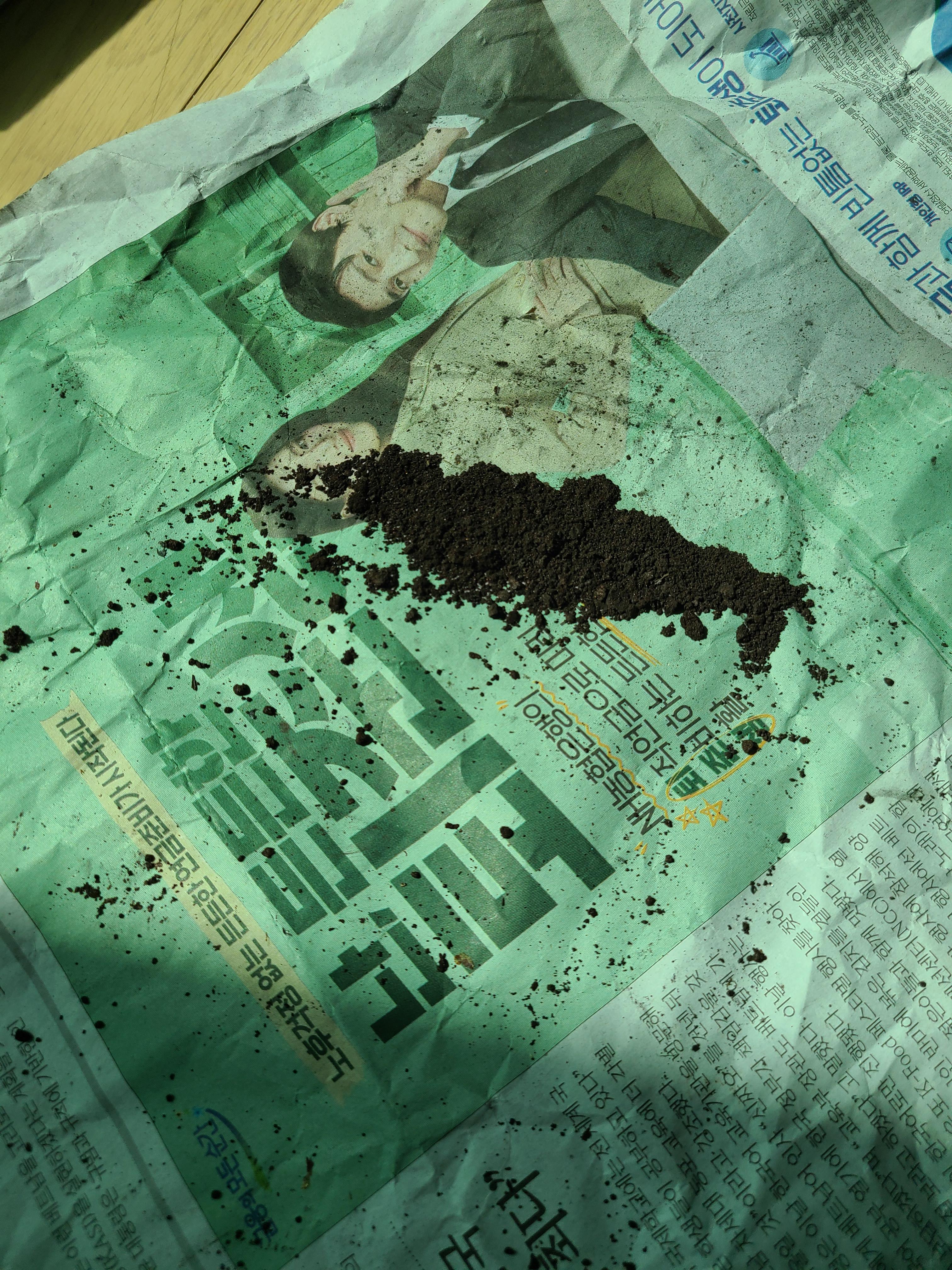
조수석 하단 블로우 모터가 있는 부분의 커버를 떼어 낸 김에 유튜브의 영상을 보고 블로우 모터를 청소했습니다. 블로우 모터를 툭툭 쳐서 털어내기만 했는데도 시커먼 것이 엄청 많이 쏟아집니다. 블로우 모터가 블로워의 밑에 있어서 저 가루들이 직접 차 내부의 공기 중에 날아다닐 가능성은 적지만 차량 연식이 좀 되신 분들에게 블로우 모터를 청소를 강력히 권장합니다.

MBW1000의 INPUT 커넥터 기능을 파악하고 제네시스 BH에 임시 연결해서 테스트에 성공했습니다. 제네시스 BH에 정식으로 설치하려는데, 차량과 연결할 커넥터가 없어서 알리익스프레스에서 구매하고 기다리는 중입니다. 커넥터가 도착하면 self 설치하고 사진을 올릴 예정입니다.
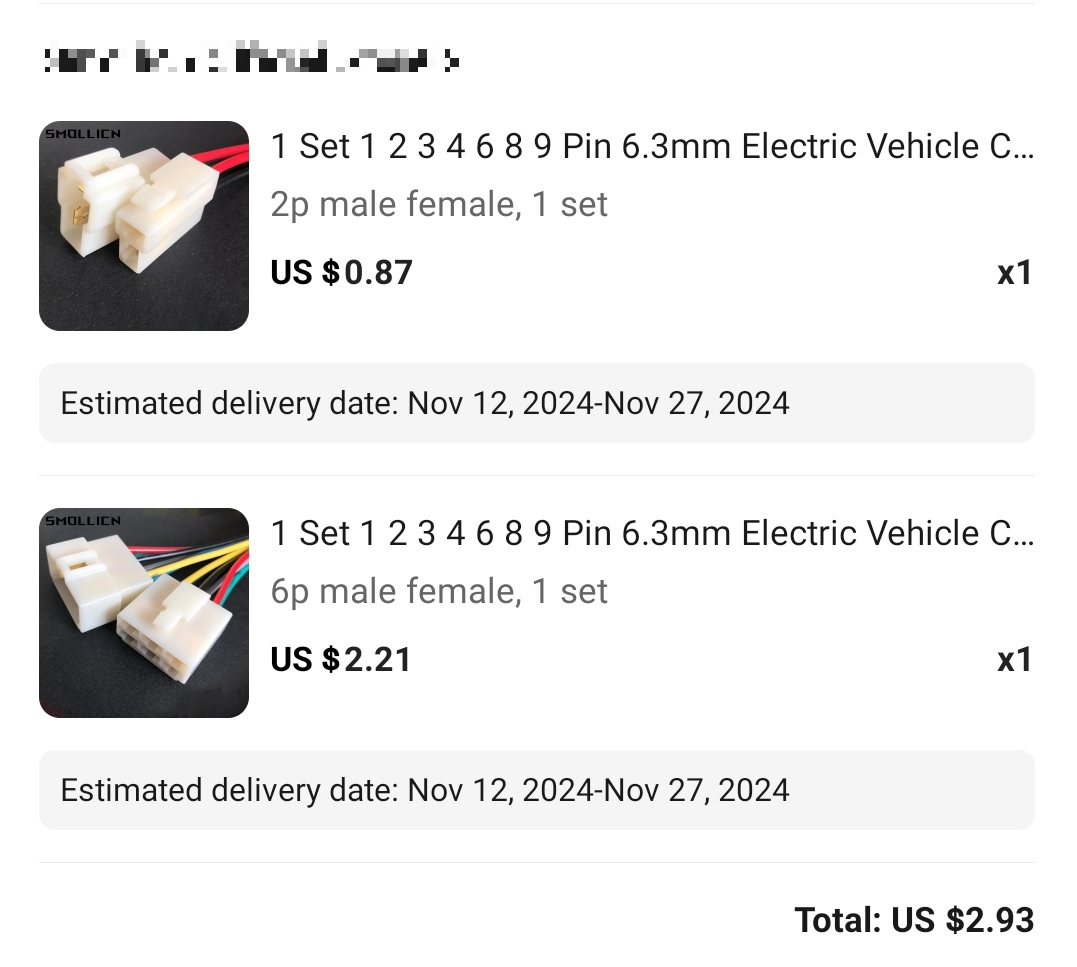
그런데 배송 정보에는 2핀짜리 하나만 있고, 6핀짜리는 없네요.
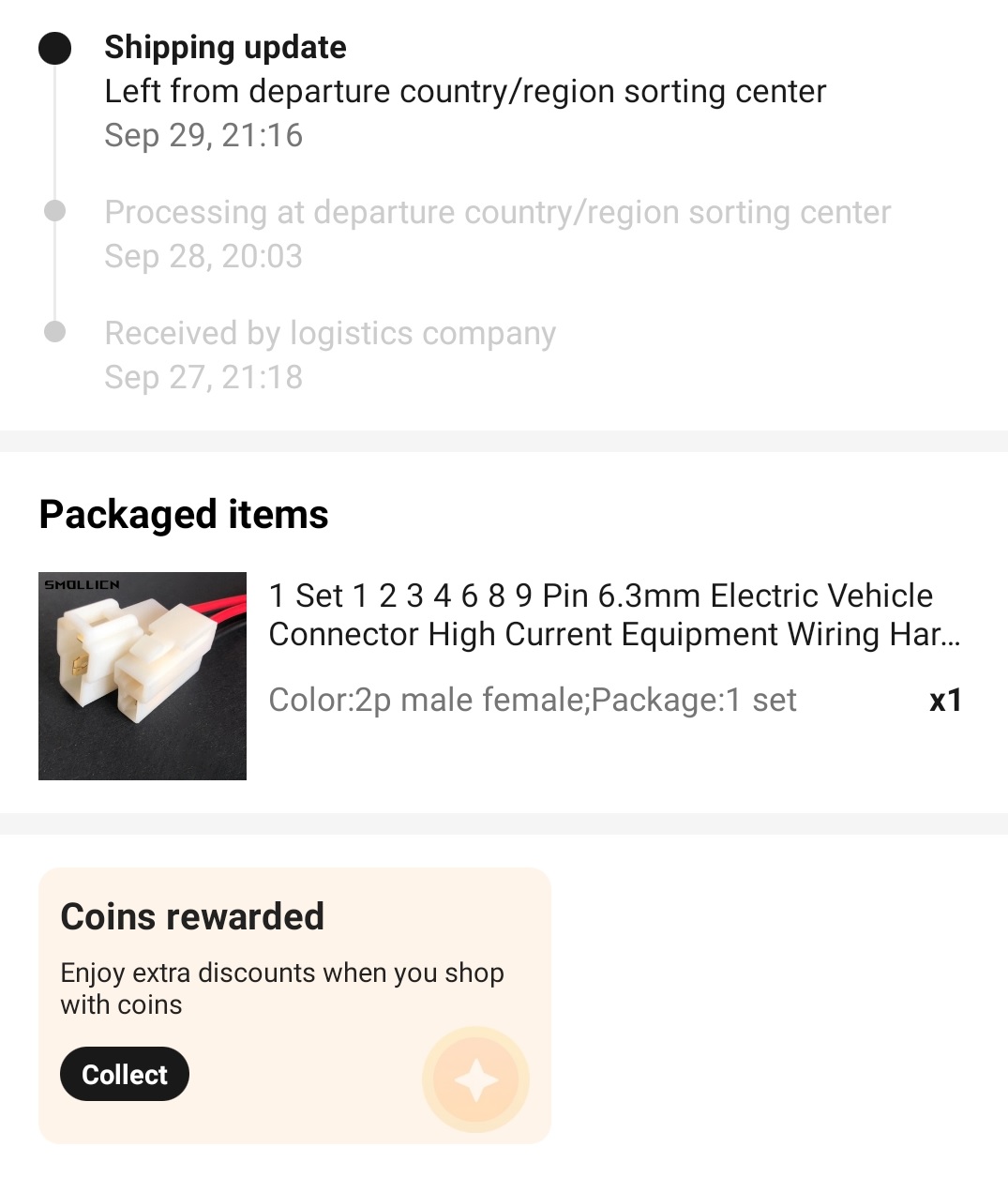
중국 판매자에게 왜 6핀짜리는 배송 정보에 없냐고 문의했습니다. 판매자는 그냥 기다리라는 답변을 하더니만 메시지 수신을 거부해 버리네요.
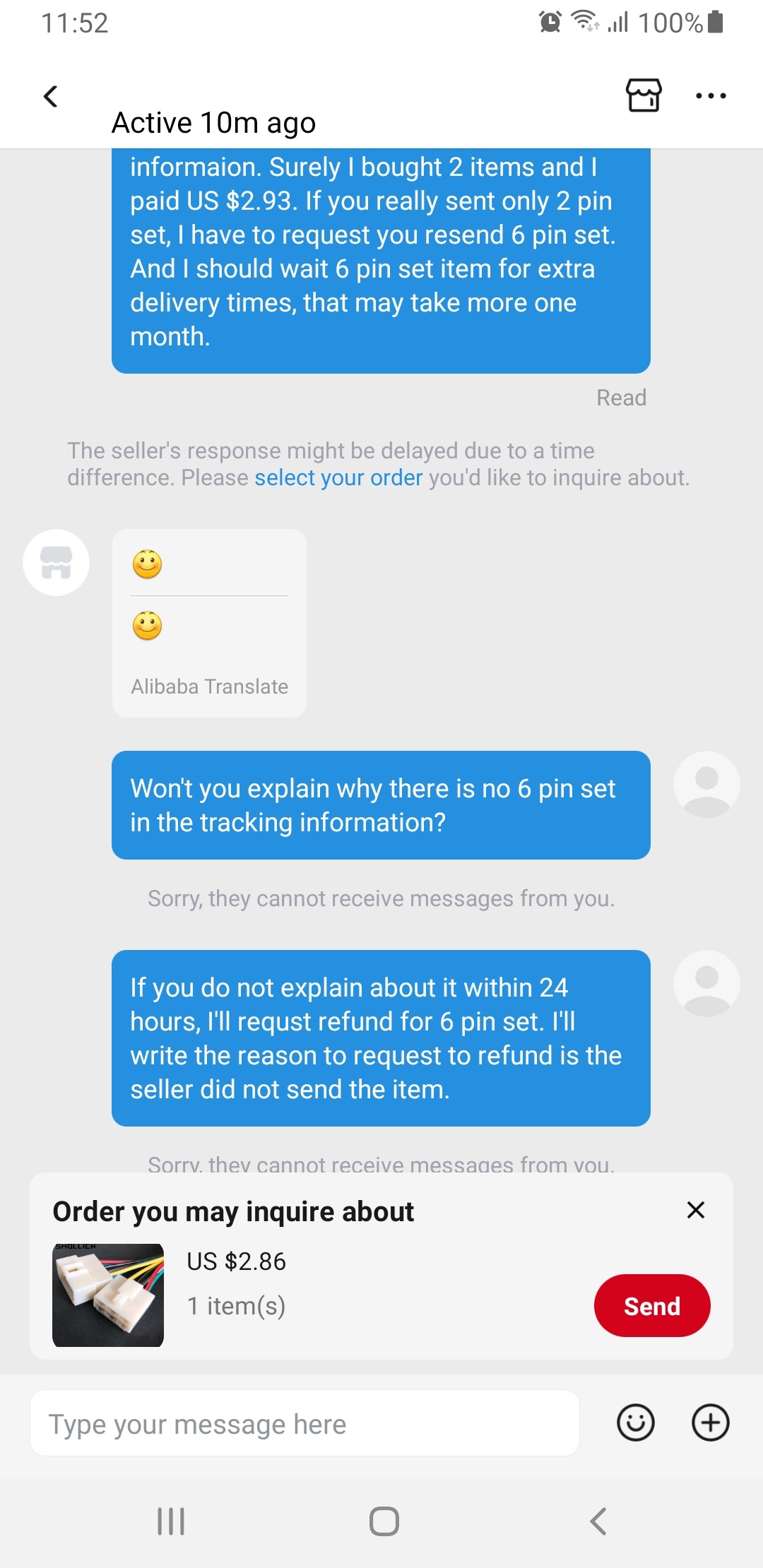
판매자가 메시지 수신을 거부한 듯
어이가 좀 없습니다. 리뷰 평균 점수가 4.7, 긍정적 비율이 97.2%인 판매자인데도 저럽니다. 알리익스프레스 판매자들 중 성의 없는 자들이 종종 있습니다. 만약 6핀짜리가 안온다면 알리익스프레스에 disput 걸고 환불 및 손해 배상하라고 요구할 참입니다.
케이블이 도착했습니다. 다행히 판매자가 2핀 6핀 모두 넣어서 보냈습니다. Package 정보에만 누락된 듯합니다.
무려 15년이나 잘 타고 다니는 2009년식 제네시스 BH에 장착해 봅니다.
그런데 문제가 생겼습니다.

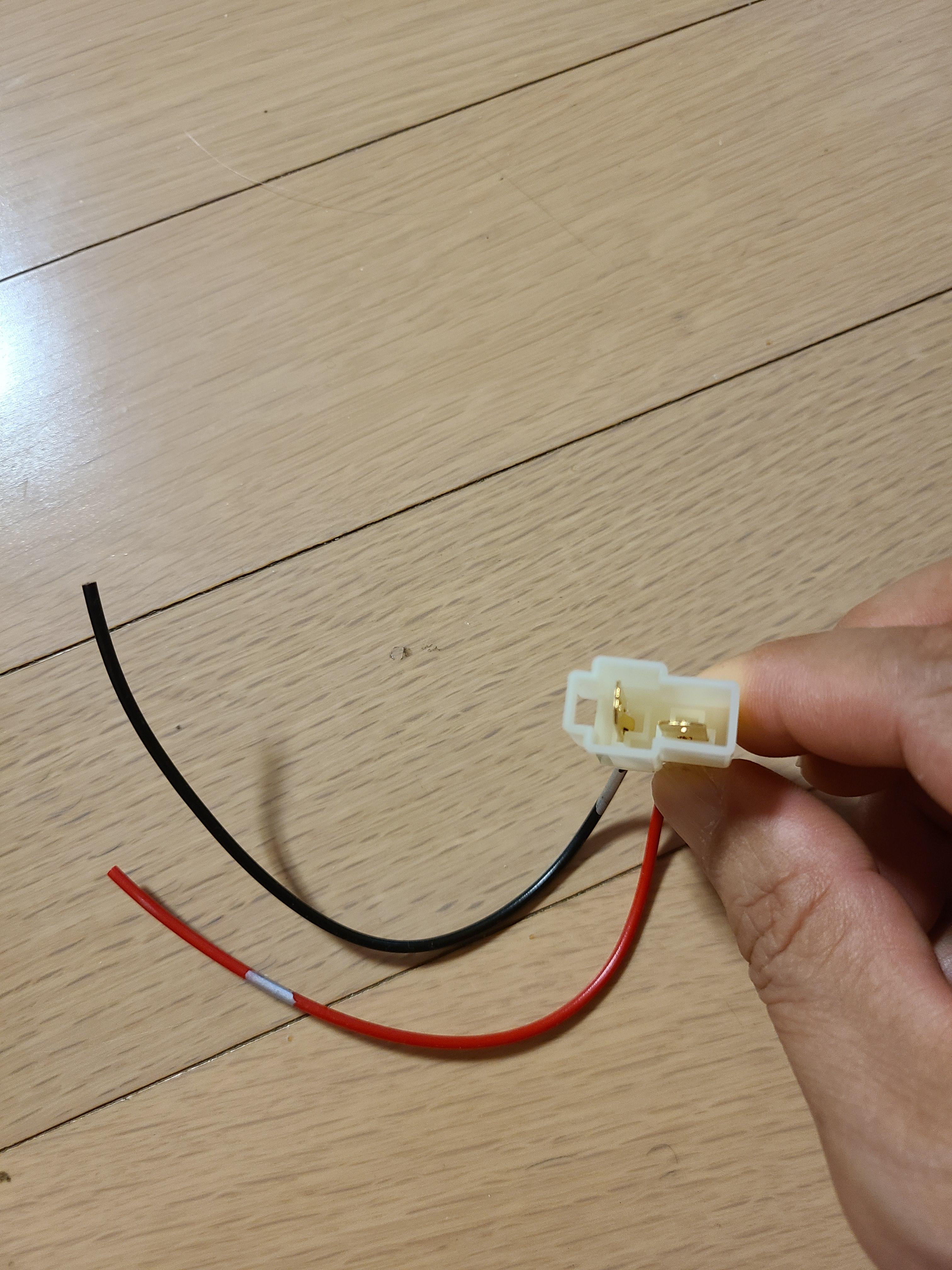
걸림 장치의 위치가 다릅니다. 할 수 없이 걸림 장치를 제거하고 연결하기로 합니다. 그뿐만이 아닙니다. 2핀 커넥터도 핀의 위치가 다릅니다. 현대/기아차는 핀이 아래, 오른쪽에 있는데 중국산 차는 반대인지 알리에서 구입한 커넥터의 핀 위치는 위, 왼쪽에 있습니다.
할 수 없이 핀들을 약간씩 휘게하여 강제로 밀어 넣는 수 밖에 없습니다. 혹시 중국에서 싼 맛에 구입하시려면 방향을 먼저 확인해 보고 구입하십시오.
또한 현대/기아차는 +가 연결되는 핀과 연결되는 알리발 커넥터의 선 색이 검은색, -가 연결되는 핀과 연결되는 선이 빨간색입니다. 나중에 혼동될까 염려되서 핀을 모두 빼서 다시 넣었습니다.
아래 사진은 핀에 연결된 선을 바꾸기 전에 찍은 것입니다.
하여간 제네시스에 설치를 시작합니다. 먼저 조수석 하단의 커버를 탈거합니다. 아래 사진의 빨간 화살표가 가리키는 부분에 있는 나사를 3개 풀면 됩니다.(장착하기 전의 사진이 없어서 장착 후의 사진으로 대체합니다.)

커버를 탈거하면 블로우 모터가 나옵니다. 블로우 모터는 나사 3개를 이용해 차량에 장착되어 있습니다.

MBT1000을 설치하기 위해서는 나사를 풀 필요는 없습니다. 다만 뜯은 김에 블로우 모터를 청소하는 것이 좋을 듯해서 나사 위치를 표시했습니다.
블로우 모터로 들어가는 커넥터와 연결하기 위해서 2핀 암 커넥터에 MBW1000 INPUT 커넥터의 ②, ⑥번 핀을 연결합니다. ②번 핀은 + 선에, ⑥번 핀은 - 선에 연결합니다. 블로우 모터로 연결하기 위해 수 커넥터에 MBW1000 INPUT 커넥터의 ⑤, ③번 핀을 연결합니다. ⑤번 핀은 + 선에 , ③번 핀은 - 선에 연결합니다. 이어서 MBW1000 INPUT 커넥터의 ①번 핀에는 휴즈 박스의 ACC 라인에 연결하고 ④번 핀은 차체에 연결합니다.


MBW1000의 INPUT ①번 핀은 위 사진의 녹색으로 표시한 휴즈 확장선의 위치에 있는 앞 열 시거잭의 휴즈에 병렬 연결했습니다. 이 위치에는 왼쪽의 핀이 배터리와 연결되기 때문에 휴즈 확장선은 반드시 위 사진과 같은 방향으로 연결해야 합니다. 녹색으로 표시한 나사는 차체와 연결되어 있습니다. 예전에 CABUS 설치하면서 차량 프레임에 연결되어 있다는 것을 확인했습니다. MBW1000의 INPUT ④번 핀을 이 볼트에 연결합니다.
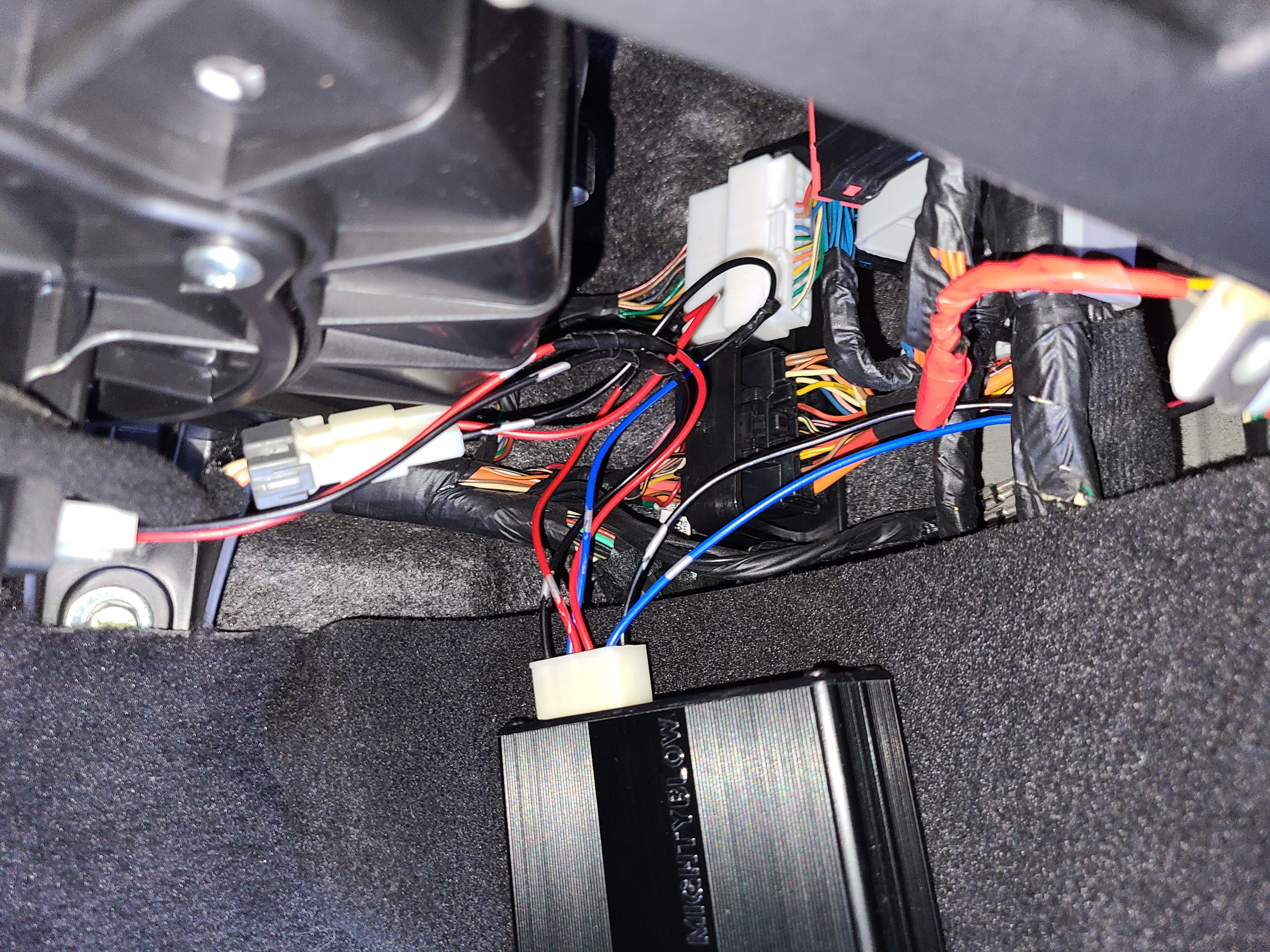
다음은 MBW1000이 조수석에 설치된 모습입니다.

MBW1000은 ACC 전원이 끊어진 후로 10분 뒤에 1분 동작, 1분 휴식을 10회 반복합니다. 설치하고 2일 운행한 후에 잘 동작하는지 확인하려고 10분을 기다렸습니다. 그런데 블로우 모터가 돌려고 희미하게 틱, 틱 거리는 소리가 들리지만 모터는 돌지는 않습니다. 테스트할 때에는 잘 돌았는데...
아무래도 이 제품도 MCU도 UPD78F0515A로 같고, 전력 관리도 똑 같은 칩 NCP81239를 쓰는 것으로 보아 SP15000이 가지고 있는 문제점을 그대로 가지고 있는 듯합니다. 너무 큰 전류로 충전해서 배터리가 견디지 못하고 사망한 것 같습니다.
MBW1000을 철거해서 점검한 결과 배터리가 사망했습니다. 18650 인산철 배터리 4개가 2S2P로 연결되어 있습니다. 이것을 분리하고 가지고 있던 중고 32700 인산철 배터리 2개를 설치했습니다. 케이스가 약간 작아서 잘 닫히지 않습니다만, 저렴한 가격에 애프터 블로우를 마련했다는 기쁨을 누리면서 테이프로 임시 변통한 후에 당분간 이대로 운행하려고 합니다.
여기에다가 알리에서 구매한 2S용 액티브 밸런서를 설치하려고 합니다. 이대로 쓰다가 이 배터리들이 수명을 다하면 18650 인산철 배터리를 새로 구매해서 설치해야겠습니다.
'WorkPlace' 카테고리의 다른 글
| 만도 AFTER BLOW VE 구매 및 투싼에 설치 (0) | 2024.10.11 |
|---|---|
| 보조배터리 SP15000 (0) | 2024.10.11 |
| Battery Balancer 수리 (1) | 2024.10.10 |
| 제네시스BH에 70mai A800 후방카메라 설치하기 (2) | 2020.12.30 |
| 제네시스 BH 핸들 틸트, 텔레스코픽 수리 (1) | 2020.12.13 |

엠쿠스
Microprocessor(STM32, AVR)로 무엇인가를 만들어 보고자 학습 중입니다.